- 2018-05-01天气晴朗适合跑步查看更多>>
- 2018-05-02天气晴朗适合跑步查看更多>>
- 2018-05-03天气晴朗适合跑步查看更多>>
- 2018-05-04天气晴朗适合跑步查看更多>>
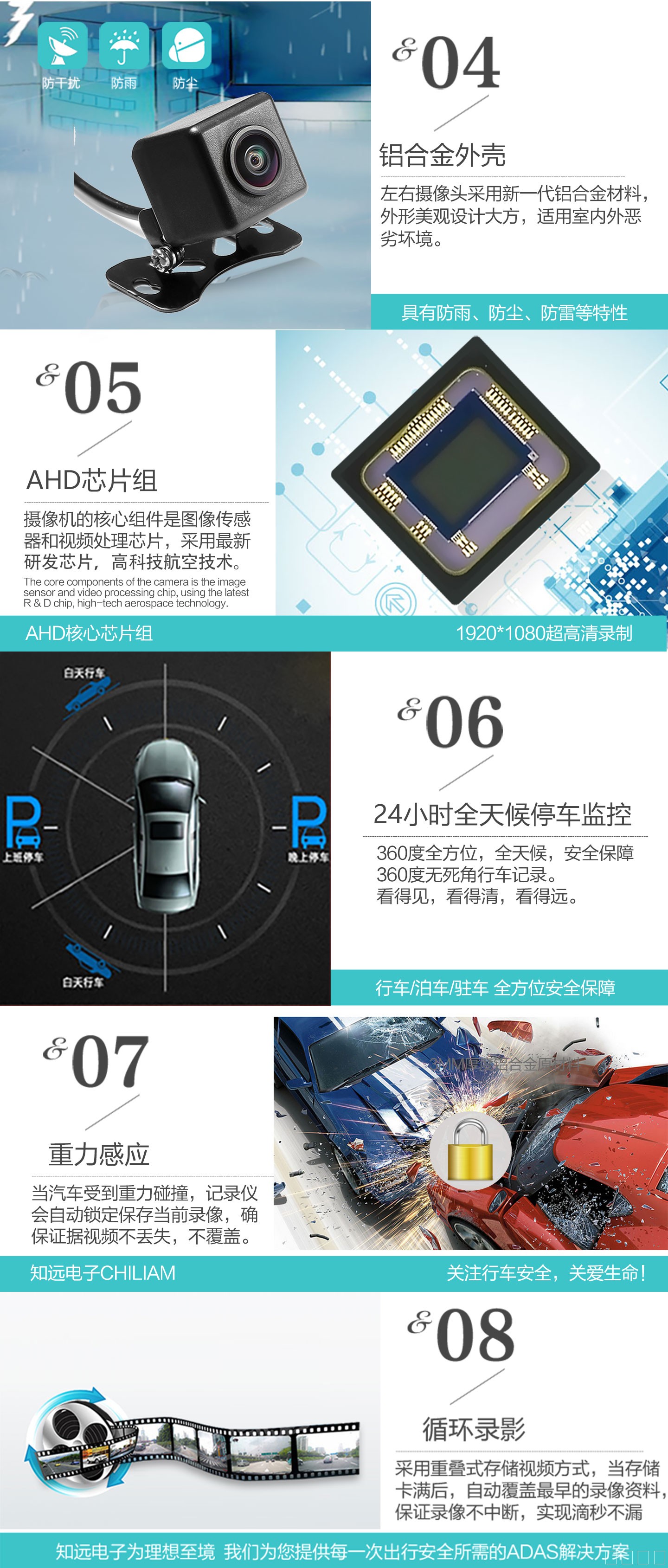
AVM (Around View Monitoring)全车监视系统、全景泊车影像系统、360度全景摄像头、360度全景影像系统、360度全景泊车系统、360度全景可视系统、360度全景倒车影像系统。
AVM (Around View Monitoring)全车监视系统、全景泊车影像系统、360度全景摄像头、360度全景影像系统、360度全景泊车系统、360度全景可视系统、360度全景倒车影像系统。
 | |
 | |
 | |
 | |
| 2D+3D显示模式 | |
 |  |
| 前行视角 | 倒车视角 |
 | |
| 左转向视角 | 右转向视角 |
| 全屏显示模式 | |
 |  |
| 全屏行驶视角 | 全屏倒车视角 |
 |  |
| 全屏左转向视角 | 全屏右转向视角 |
应用案例
 |
 | 应用 侧边停车、倒车入库、狭窄路段、陡坡行车、低矮障碍、转弯盲区 特点 双核高速CPU、行车全景记录、智能四轮轨迹、停车震动监控、四角可视雷达、独特无缝拼接、倒车自动切换、倒车自动切换、特制广角镜头、环视全景视图、单图自由切换放大、专车专用镜头、睡眠待机保护、智能平面矫正、图文安装指导 汽车360°全景影像环视系统 360度环视全景影像,四面八方一目了然. |
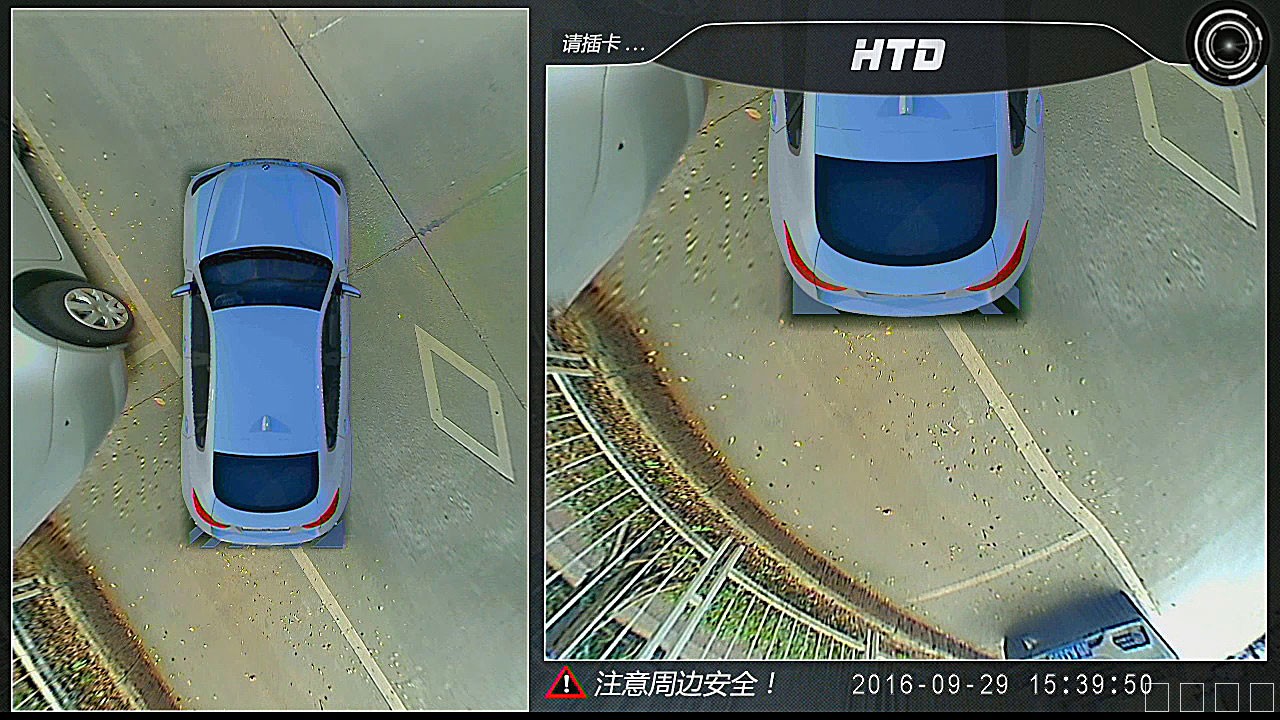
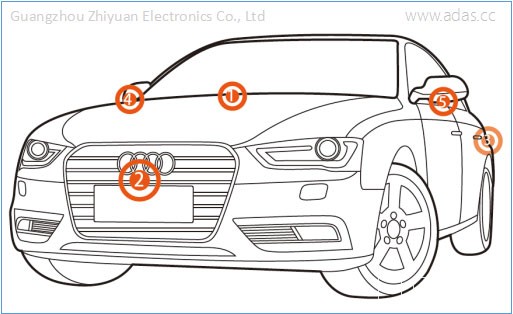
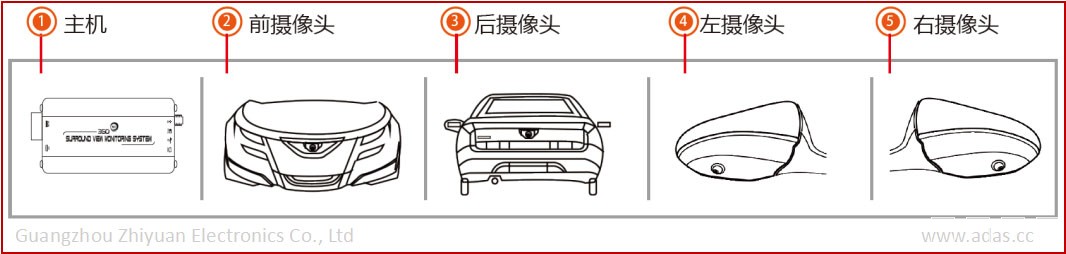
360度全景泊车系统(SVM),通过安装在车辆前、后、左右后视镜中的四个超广角摄像头,可以感知车辆周围环境,通过虚拟场景投影重建技术,可以实现包括顶视图,前后角视图,前进/倒车视图,左右侧视图,任意虚拟视点视图等多种虚拟视角的图像,为驾驶员提供全方位的车辆周边图像信息,消除传统驾驶员视觉死区,使驾驶更安全和随意。 | 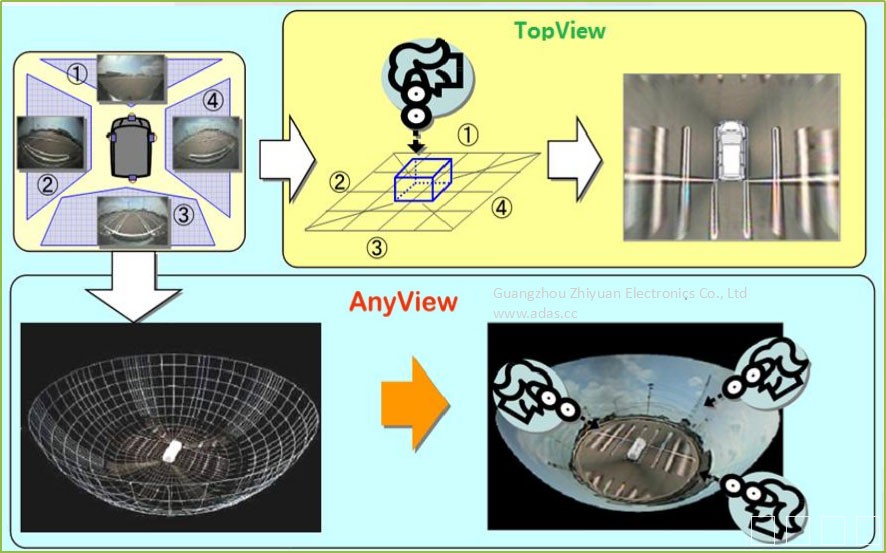 |
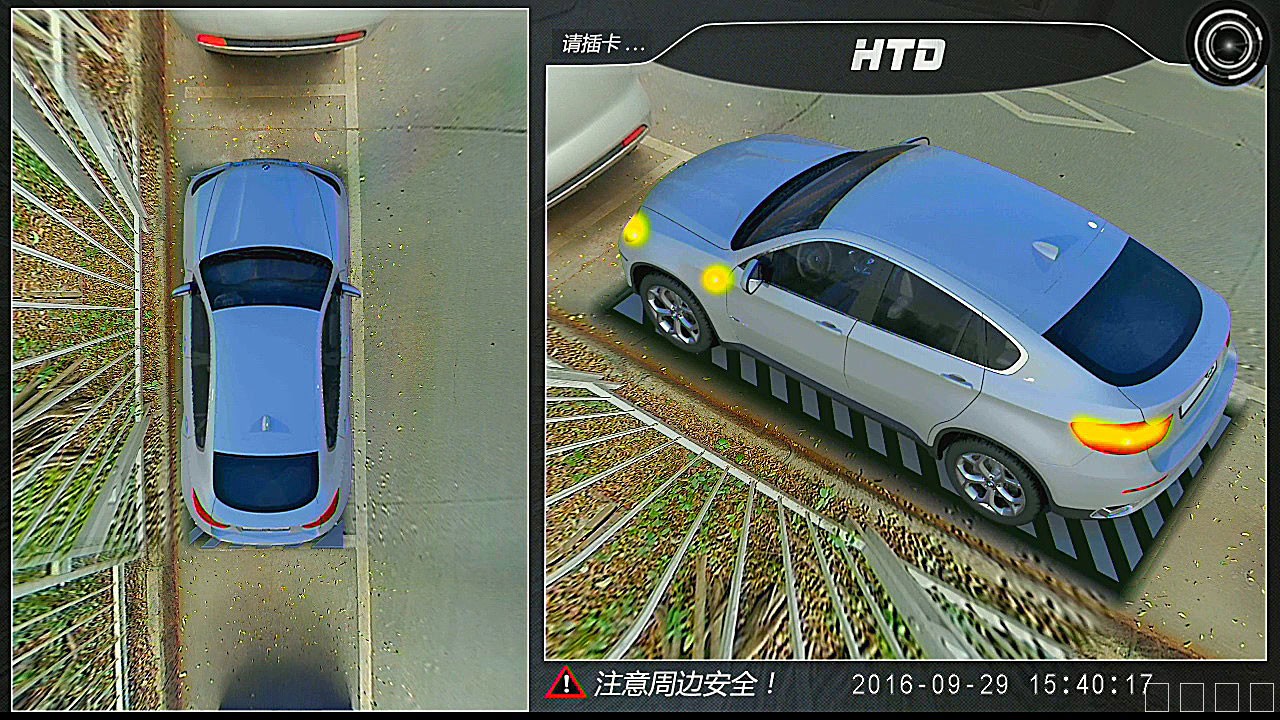
全景泊车系统可以为驾驶员提供低速、垂直停车、侧方停车、倒车、窄路进出、周边环境观察等几个典型场景下的辅助驾驶视角影像。通过与车辆总线的互连,系统可以通过车速,档位,左右转向灯,远光等信号,实现对视角/图像的快速切换,避免驾驶员出现“手忙脚乱”的情形。 | ||
 |
在全景泊车应用上,相对于镜头畸变校正、图像融合与拼接等基础技术,知远电子本着硬件物尽其用、软件精益求精的原则,对全景泊车的底层技术进行了深入的研究。 | 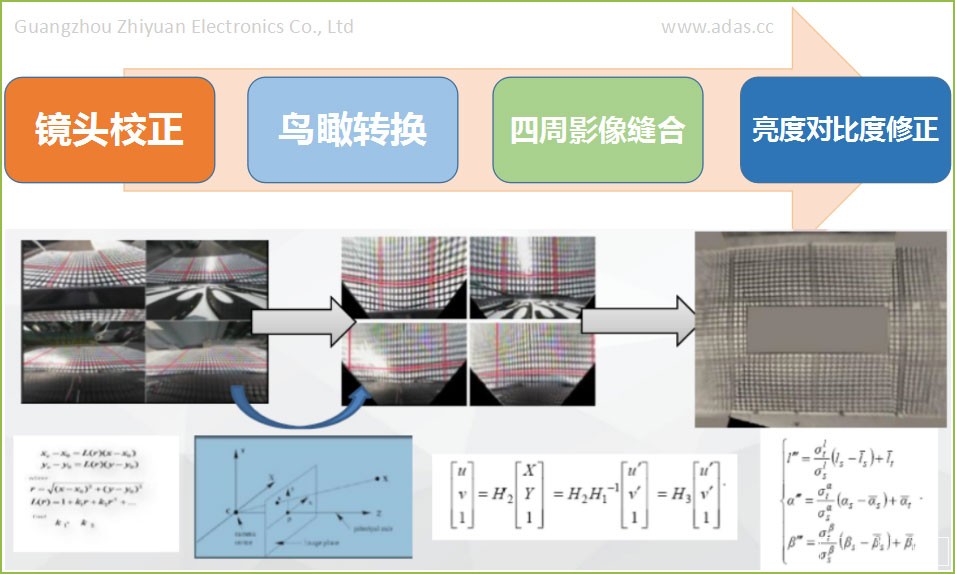 |
 | 1.选择汽车前中网栅格板合适位置, 将摄像头嵌入。 2.将摄像头连接线与延长线对接,等 待下一步测试和调试。 3.安装的位置需要保证摄像头视线与 地面不能被过多遮挡,否则会造成全 景拼接困难。 4.将摄像头螺丝柱穿过车标空隙后用 挡片和螺母固定。 |
 | |
 | ||
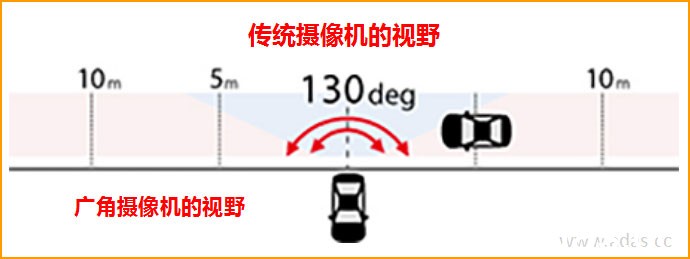 | 通过广角摄像机提供180度大范围广角视野。倒车时,广角模式可以确认到前后左右方向接近的车辆和行人。标识线辅助倒车入库。 价值 倒车时,通过广角摄像机影像确认后方视野,提高安心感。 | |
在全景泊车应用上,相对于镜头畸变校正、图像融合与拼接等基础技术,知远电子本着硬件物尽其用、软件精益求精的原则,对全景泊车的底层技术进行了深入的研究。 | |
注:产品根据不同车型或客户要求会有所不同。  | ||
| 主机接口 | ||
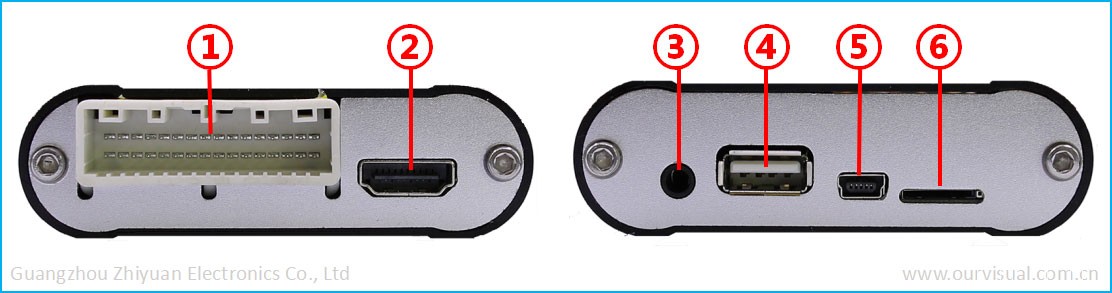 | ||
| ① EXT CON ② HDMI | ||
| ③ UART ④ USB ⑤ Update ⑥ TF |
| 摄像头参数 | ||
规范 | 说明 | |
| 1 | 外壳设计 | 塑料或金属带可调金属支架 |
| 2 | 颜色 | 黑色 |
| 3 | Extras | 180°视角(对角线) |
| 4 | 图像传感器 | AR0130(豪华版)XP20(标准版) |
| 5 | 输出信号 | AHD |
| 6 | 有效像素 | 1280*720p |
| 7 | 镜头 | 1.9mm / F 2.0 |
| 8 | Lux | 0,1 min. illumination |
| 9 | 解析度 | 1280*720 |
| 10 | 视角 | horizontal 180° vertical 95° |
| 11 | IP Rating | IP 67 |
| 12 | Terminal | 4-pin mini-plug ( male ) 5,2 mm |
| 13 | 电源 | DC 5V —— 12V+5% |
| 14 | 工作电流 | 100mA |
| 15 | 工作温度 | 20°C - 85°C |
| 16 | 储存温度 | -40°C - 105°C |
| 17 | 尺寸 | L/W/H - 23mm/23mm/26mm |
| 主机参数 | ||
参数类型 | 规范 | 说明 |
视频 | 视频界面 | BMW接口 |
输入/输出的阻抗 | 75 | |
振幅 | 典型的1Vpp,1.2Vpp最大 | |
带宽 | 8MHz | |
采样频率 | 13.5MHz | |
DP(差分相位) | <0.8度TYP | |
DG(微分增益) | <3%TYP | |
信噪比 | 70dB | |
指示灯/闪光灯 | 高光束 | 可选 |
左右转向信号灯 | 支持 | |
倒车灯 | 支持 | |
重力感应 | BM250E | 博世 |
压缩 | 算法 | H.264压缩技术@L3.1 |
分辨率 | 1920*1080p@30fps | |
比特率 | 5Mbps,2Gbyte/Hour | |
记录介质 | 高速读写U盘/TF卡 | |
磁盘容量 | TF卡 | 32G SDIO3.0/SDIO2.0 |
U盘 | 128G USB2.0 | |
功率消耗 | 4路视频+360度全景模式 | ~600mA |
4路视频录制模式 | 500mA | |
睡眠模式 | <5mA | |
三维空间 | 长*宽*高 | 123*81*25mm(主机盒) |
重量 | 220g | |
环境 | 正常工作 | -30℃~+85℃ |
储存媒介 | -40℃~+105℃ | |
相对湿度 | 0~95% | |
电压容差 | 工作电压 | DC 8~36V |